DynaMem是什么
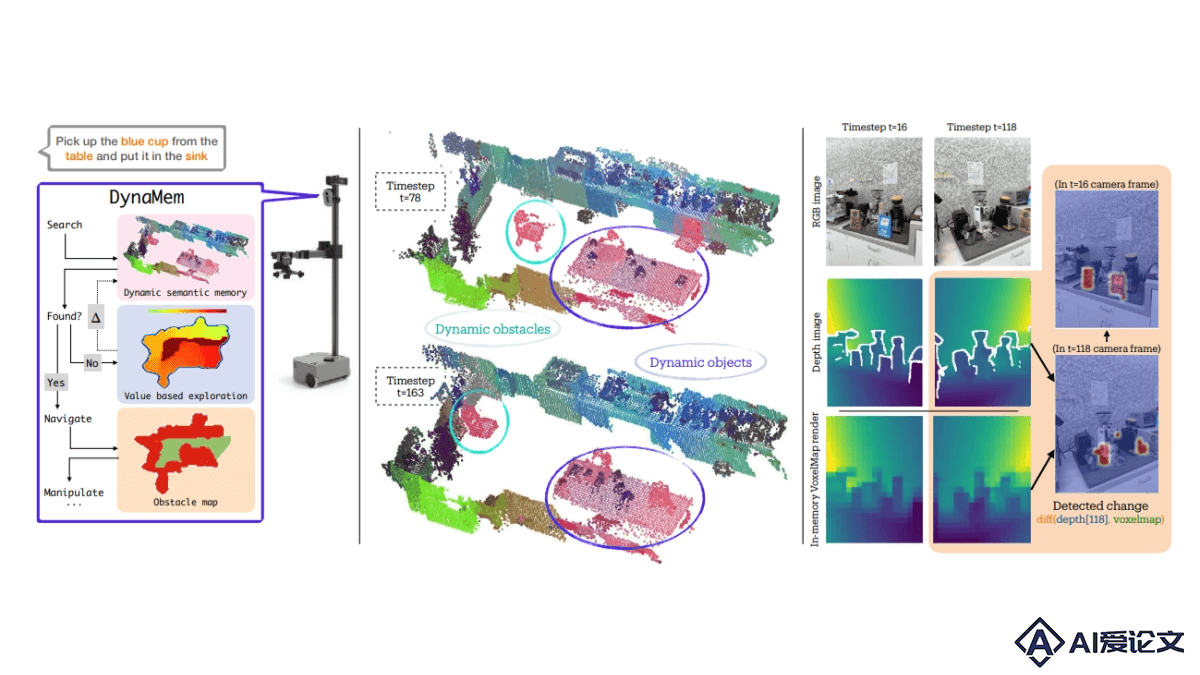
DynaMem是纽约大学和Hello Robot推出的动态空间语义记忆系统,专为开放世界中的移动操作设计。基于维护一个特征点云作为机器人记忆,处理环境中的动态变化,如物体的添加和移除。当接收到新的RGBD观测时,DynaMem更新记忆,添加新物体并移除不再存在的点。DynaMem根据文本查询定位物体,在必要时导航至目标物体。DynaMem在动态物体处理上表现出色,成功率达到70%,显著高于传统系统。
来源:爱论文 时间:2025-02-03 21:30:47
DynaMem是纽约大学和Hello Robot推出的动态空间语义记忆系统,专为开放世界中的移动操作设计。基于维护一个特征点云作为机器人记忆,处理环境中的动态变化,如物体的添加和移除。当接收到新的RGBD观测时,DynaMem更新记忆,添加新物体并移除不再存在的点。DynaMem根据文本查询定位物体,在必要时导航至目标物体。DynaMem在动态物体处理上表现出色,成功率达到70%,显著高于传统系统。
 相关资讯
更多+
相关资讯
更多+
DynaMem是纽约大学和Hello Robot推出的动态空间语义记忆系统,专为开放世界中的移动操作设计。基于维护一个特征点云作为机器人记忆,处理环境中的动态变化,如物体的添加和移除。当接收到新的RGBD观测时,DynaMem更新记忆,添加新物体并移除不再存在的点。
AI教程资讯
 2023-04-14
2023-04-14

MVPaint是腾讯PCG 、上海AI LAB、南洋理工大学S-Lab、清华大学共同推出的3D纹理生成框架,基于同步多视角扩散技术实现高分辨率、无缝且多视图一致的3D纹理生成。MVPaint包含三个核心模块:同步多视角生成(SMG)用在初始化纹理,空间感知3D修补(S3I)用在填补未观察区域,及UV细化(UVR)用在改善UV空间纹理质量。
AI教程资讯
2023-04-14

LTX Video是Lightricks推出的开源AI视频生成模型,能在4秒内生成5秒的高质量视频,速度超过观看速度。基于2亿参数的DiT架构,确保帧间平滑运动和结构一致性,解决了早期视频生成模型的关键限制。LTX Video支持长视频制作,提供灵活性和控制力,适用于多种场景,包括游戏图形升级和电子商务广告变体制作。
AI教程资讯
2023-04-14
BALROG是评估大型语言模型(LLMs)和视觉语言模型(VLMs)在游戏上的推理能力,特别是模型在动态环境中的规划、空间推理和探索能力。基于一系列挑战性的游戏环境,包括程序生成的环境如NetHack,测试模型性能。BALROG揭示了现有模型在简单任务上的成功和在复杂任务上的挑战,尤其是在涉及视觉决策时。
AI教程资讯
2023-04-14
热门推荐
更多+
AI工具推荐
更多+


 下载
下载















